At crowdfunding web site "Makuake"
https://www.makuake.com/project/robot_shop/
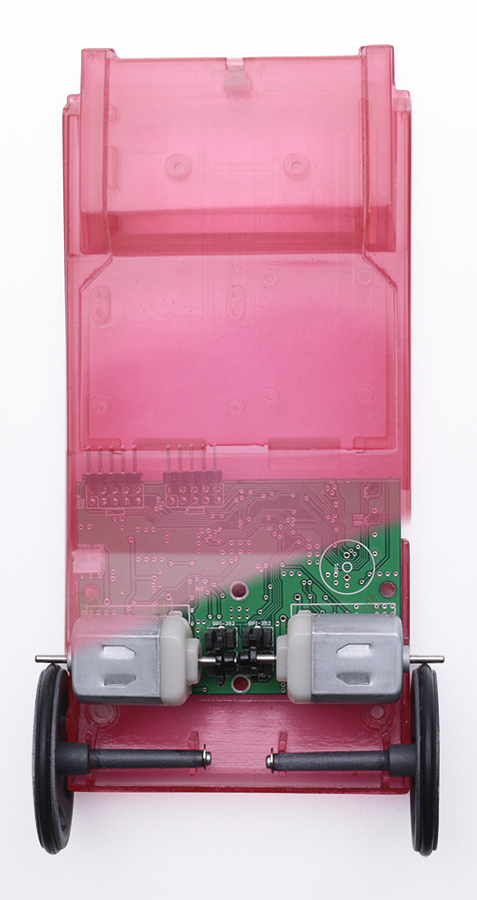
Inverted pendulum type robot teaching material "Beauto Balancer 2"
"Beauto Balancer 2", is the inverted pendulum robot teaching materials with two drive wheels.
http://www.vstone.co.jp/products/beauto_balancer_2/
Using the software that can parameter adjustment and sensor values displayed in GUI format, can be easily inverted experiment. In addition, sample source library for development also gratis, C language programming is also available.
Features of 02 this product
Excellent mobility and stability by two-axis motor bidirectional current detection circuit equipped
The robot is equipped with a motor of left and right two axes, you can move the turning behaviour before and after.
Each motor is equipped with a bidirectional current detection circuit,
can be inverted controlled by torque command of the DC motor, it is
possible to perform a stable control regardless of the remaining amount
of the battery.
Lightweight and easy to assemble the vehicle body by the resin frame
And manufacturing the frame parts of the body with polycarbonate resin durable. The covers the entire functional parts including the control board, to ease the shock of a fall.
The assembly of the body using only the Phillips screwdriver (# 2), you
can assemble without the complicated work such as soldering.
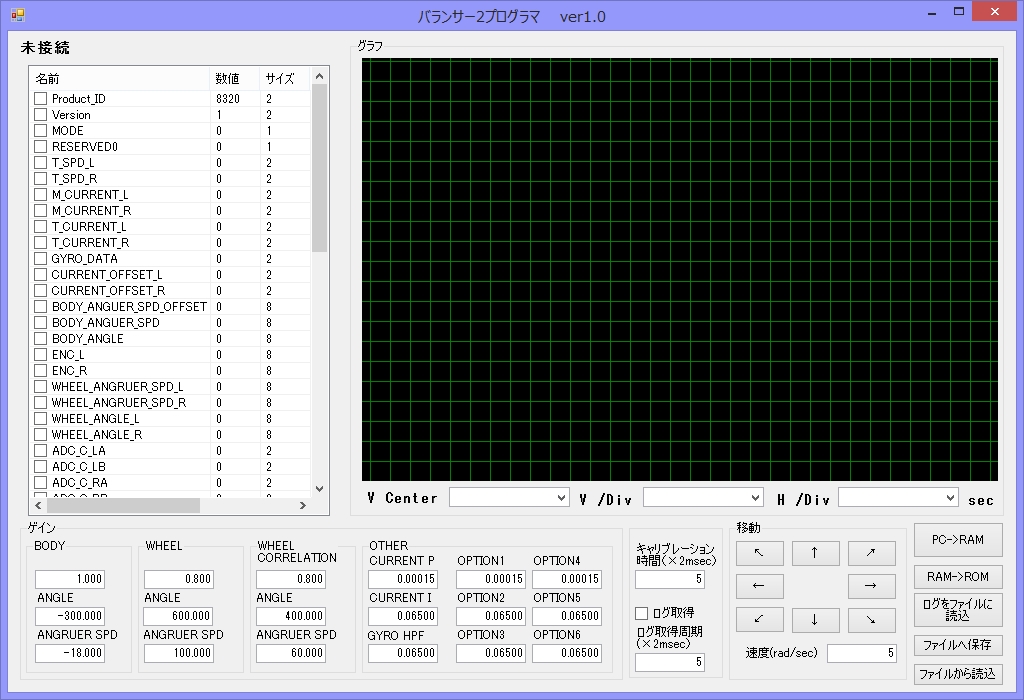
Publish easily handle software even inexperienced person
Software for control of the body "balancer 2 Programmer" is a software
for carrying out such an inverted adjustment and the body of the behaviour experiments.
Parameter adjustment of sensor gain, etc. in the GUI format can be
easily performed, you can easily to be inverted the body also the first
scholar of the inverted pendulum.
In addition, or reads the parameters monitoring display (numeric-graph
display) from the body, can log data output in CSV format, it is
possible to take advantage of a simple experiment.
Log data recorded during the operation in the body alone also can CSV
output from this software, it has become easier to use in the experiment
of PC-less wireless.
And prepare a C-language development environment corresponding to each PC side and the body side
After the inverted pendulum of training in the GUI software, you can step up to the C language programming.
The C language programming, you can choose and how to rewrite the
firmware in the robot body, the two types of methods for communication
control the body from a PC using a dedicated USB communication library.
The programming of the robot body side, NXP Semiconductors is using a C
language integrated development environment "LPCXpresso" which was
published free of charge, for the ARM microcontroller (NXP
Semiconductors' made ARM Cortex-M3 LPC1343), which is the main CPU of
the control board I will do the programming.
Sample source for the inverted also public, is possible to control the
acquisition and motor sensor values by using a dedicated library, you
can implement an inverted control with less code.
The programming on the PC side, it is done by using a dedicated communication library "balancer 2 SDK".
Balancer 2 SDK is available in the Microsoft Visual C ++, etc., is a
library for reading and writing the memory map of the body via the USB.
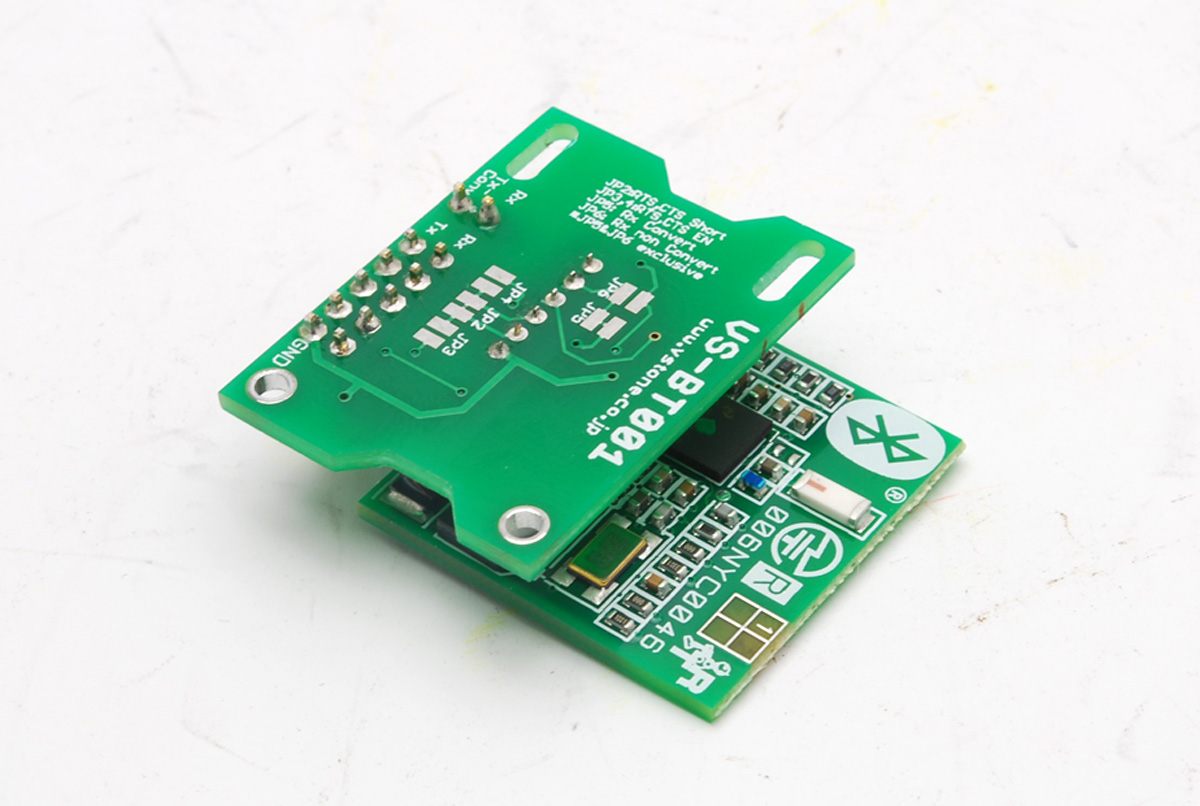
And prepare the advanced options of Bluetooth, etc. and rich I / O port
The control board of the robot body UART, is equipped with a I2C port,
etc., enables more sophisticated control by installing the option.
Wireless controller "VS-C3" The options, SPP protocol-enabled Bluetooth
module "VS-BT001" or the like can use the, by mounting them or remote
control steer the body, it is possible to communicate control wirelessly
from PC .



No comments:
Post a Comment