At crowdfunding web site "Makuake"https://www.makuake.com/project/robot_shop/
Inverted pendulum type robot teaching material "Beauto Balancer 2"
"Beauto Balancer 2", is the inverted pendulum robot teaching materials with two drive wheels.
http://www.vstone.co.jp/products/beauto_balancer_2/
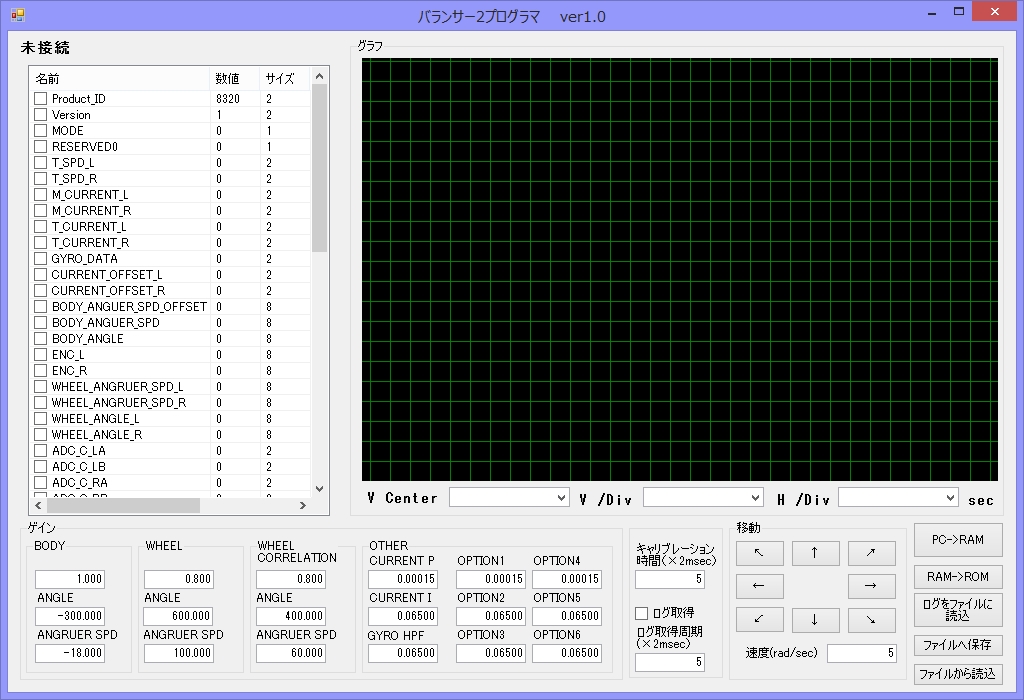
Using the software that can parameter adjustment and sensor values displayed in GUI format, can be easily inverted experiment. In addition, sample source library for development also gratis, C language programming is also available.
Features of 02 this product
Excellent mobility and stability by two-axis motor bidirectional current detection circuit equipped
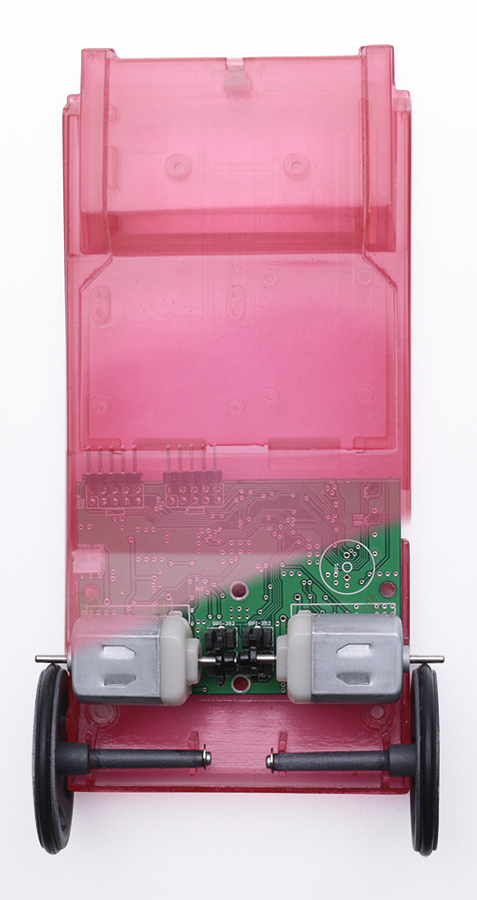
Lightweight and easy to assemble the vehicle body by the resin frame

Publish easily handle software even inexperienced person
And prepare a C-language development environment corresponding to each PC side and the body side
After the inverted pendulum of training in the GUI software, you can step up to the C language programming. The C language programming, you can choose and how to rewrite the firmware in the robot body, the two types of methods for communication control the body from a PC using a dedicated USB communication library.
The programming on the PC side, it is done by using a dedicated communication library "balancer 2 SDK". Balancer 2 SDK is available in the Microsoft Visual C ++, etc., is a library for reading and writing the memory map of the body via the USB.
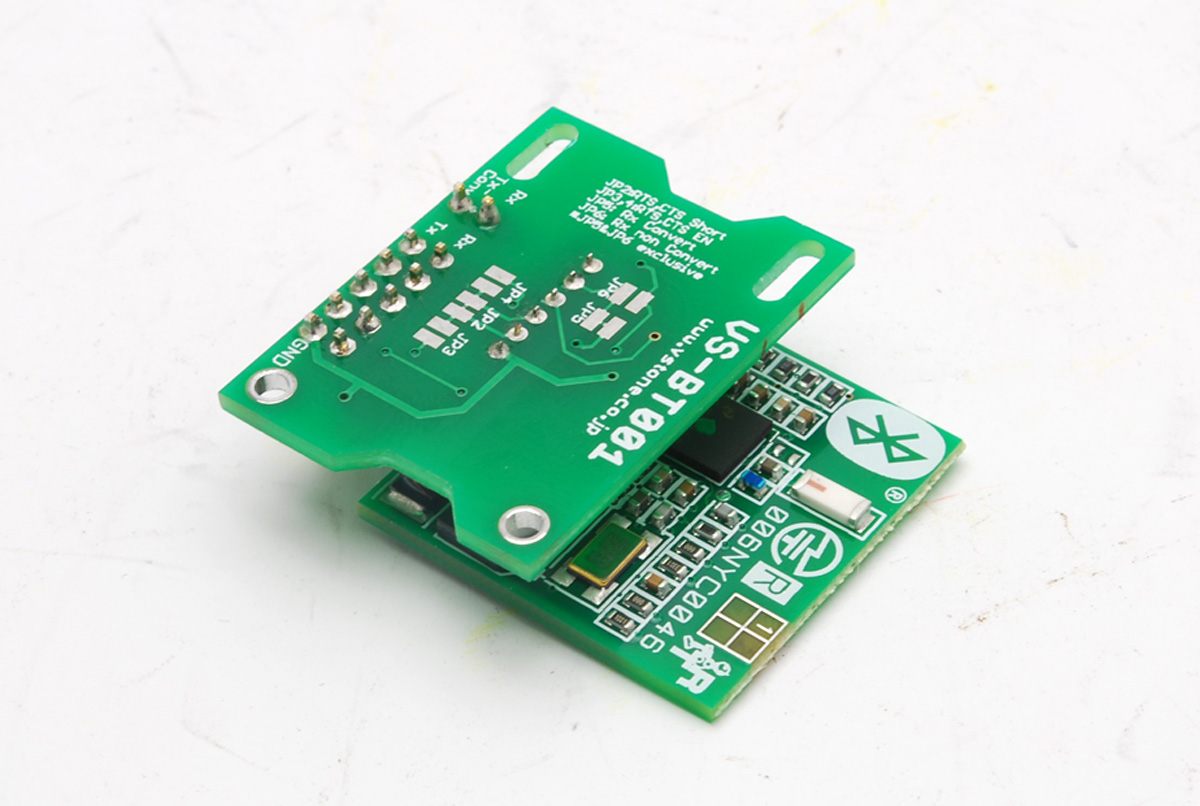
And prepare the advanced options of Bluetooth, etc. and rich I / O port

 The
The