
Thursday, March 2, 2023
Friday, February 17, 2023
Charleston Robotics ChIMP
San April 2, 2022 at Circuit Launch, Silicon Valley Robotics , hosting the Robot Block Party.
This was a very cool, hoverboard based Balancing Telepresence Robot.



https://www.youtube.com/channel/UCubRX6fqvuG0zC_k_302liQ
https://www.charlestonrobotics.com/ (site dead at this time, not on archive.org)
https://www.instructables.com/ChIMP-This-IS-the-Droid-Youve-Been-Looking-For/
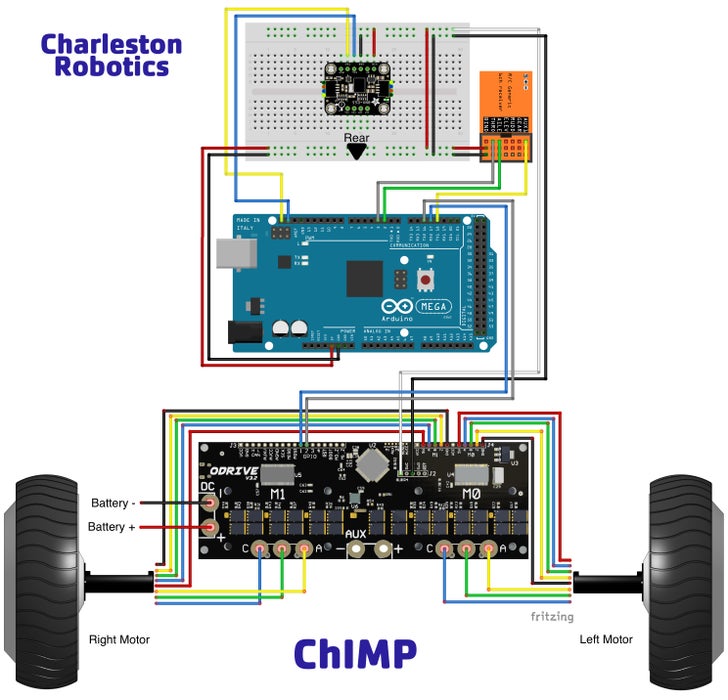
- An Arduino Mega https://store.arduino.cc/mega-2560-r3. Using the Mega because the project needs three hardware interrupt pins to decode the RC receiver's PWM signals.
- A Bosch BNO055 IMU https://www.adafruit.com/product/2472. Gives ready-to-use tilt angle estimation as well as gyro and accelerometer raw readings.
- An ODrive motor controller (48V) https://odriverobotics.com/shop/odrive-v35. Enables very smooth current control for the two motors.
https://github.com/CharlestonRobotics/ChIMP
Wednesday, February 15, 2023
Tuesday, February 7, 2023
Interesting Libraries for WebRTC.
Session Traversal Utilities for NAT (STUN) https://www.rfc-editor.org/rfc/rfc8489.html
Traversal Using Relays around NAT (TURN) https://www.rfc-editor.org/rfc/rfc8656.html
Interactive Connectivity Establishment (ICE) https://www.rfc-editor.org/rfc/rfc8445.html
coturn is a free open source implementation of TURN and STUN Server.
The TURN Server is a VoIP media traffic NAT traversal server and gateway.
https://github.com/coturn/coturn
Violet - Lightweight STUN/TURN server
Violet is a lightweight STUN/TURN server (RFC8489 and RFC8656) written in C without dependencies, based on libjuice.
https://github.com/paullouisageneau/violet
https://github.com/libnice/libnice
libjuice - UDP Interactive Connectivity Establishment
libjuice (JUICE is a UDP Interactive Connectivity Establishment library) allows to open bidirectionnal User Datagram Protocol (UDP) streams with Network Address Translator (NAT) traversal.
The library is a simplified implementation of the Interactive Connectivity Establishment (ICE) protocol, client-side and server-side, written in C without dependencies for POSIX platforms (including GNU/Linux, Android, Apple macOS and iOS) and Microsoft Windows. The client supports only a single component over UDP per session in a standard single-gateway network topology, as this should be sufficient for the majority of use cases nowadays.
https://github.com/paullouisageneau/libjuice
libdatachannel - C/C++ WebRTC network library
libdatachannel is a standalone implementation of WebRTC Data Channels, WebRTC Media Transport, and WebSockets in C++17 with C bindings for POSIX platforms (including GNU/Linux, Android, FreeBSD, Apple macOS and iOS) and Microsoft Windows. WebRTC is a W3C and IETF standard enabling real-time peer-to-peer data and media exchange between two devices.
https://github.com/paullouisageneau/libdatachannel
datachannel-wasm - C++ WebRTC Data Channels for WebAssembly in browsers
https://github.com/paullouisageneau/datachannel-wasm
HUSARNET: A PEER-TO-PEER, LOW LATENCY VPN FOR ROBOTS
Peer-to-Peer VPN to connect your laptops, servers or microcontrollers over the Internet with zero configuration.
VPN for ROS
From ROS perspective, Husarnet is simply a LAN network. Our tools are ROS aware and can help you configure and monitor your ROS network.
Sunday, February 5, 2023
Visual-Inertial Odometry (VIO) with Spectacular AI SDK
Spectacular AI SDK fuses data from cameras and IMU sensors (accelerometer and gyroscope) and outputs an accurate 6-degree-of-freedom pose of a device. This is called Visual-Inertial Odometry (VIO) and it can be used in, among other cases, tracking (autonomous) robots and vehicles, as well as Augmented, Mixed and Virtual Reality.

Spectacular AI SDK examples
https://github.com/SpectacularAI/sdk-examples
Supported devices
Out-of-the-box
The SDK supports a limited set of devices out-of-the-box. This means that the SDK can be used without any manual calibration, integration or parameter tuning, with these devices. If you want to test the SDK as easily as possible, we recommend buying one of these devices.
- OAK-D by Luxonis. Other stereo OAK variants with IMU sensors (e.g., OAK-D-PoE, OAK-D-CM3/4) are also supported, but not monocular systems nor OAK-D-Lite. There is an easy-to-use Python wrapper and a C++ version.
- Intel RealSense D455 and D435i (notice the "i", which is for IMU and is a must-have. D435 is not supported). Currently only supported on x86-64. Available as a C++ version.
https://github.com/SpectacularAI/sdk
The SDK is available for non-commercial use with Luxonis OAK-D device family for Python with pip install spectacularai. The C++ version for OAK-D and additionally for Intel RealSense D455 & D435i you can download from the Releases on the right.
For more alternatives (support for other devices), CPU architectures (ARM) and commercial licensing options, please contact us at https://www.spectacularai.com.
Subscribe to:
Posts (Atom)